How feasible is use of the Robotic ENT Microsurgery System (REMS) in stabilization for microvascular surgery?
Bottom line
The REMS (Galen Robotics, Inc.) is a feasible adjunct for microvascular surgery and a potential teaching tool capable of reducing tremor in novice users.
Explore This Issue
November 2017Background: The microvascular anastomosis of vessels 1 mm to 5 mm in diameter is one of the most technically challenging procedures within otolaryngology–head and neck surgery. Unfortunately, no robotic platform is currently capable of improving the surgeon’s dexterity and operative efficiency for microvascular surgery. The REMS’ force-feedback control system stabilizes the user’s primary instrument, which may particularly help less experienced surgeons.
Study design: Prospective feasibility study performed by six microvascular naïve participants and one microvascular expert on a chicken thigh model.
Setting: Robotics Lab at the Department of Otolaryngology–Head and Neck Surgery, Johns Hopkins School of Medicine, Baltimore.
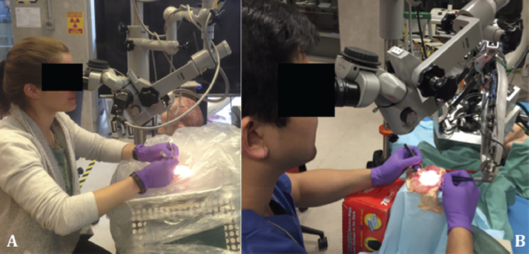
(A) Experimental setup for freehand microvascular anastomosis trials; (B) experimental setup for Robotic ENT Microsurgical System-assisted microvascular anastomosis trials.
© The American Laryngological, Rhinological and Otological Society, Inc.
Synopsis: The mean microvascular tremor scale (MTS) scores for microvascular-naïve participants varied from 2.40 for freehand trials to 0.72 for REMS-assisted trials; less variation was seen for the microvascular expert. For microvascular-naïve participants, the mean time to completion (TTC) for freehand trials was 1,320 seconds, compared to 1,265 seconds for REMS-assisted trials. There was a significant difference in TTC when the trials were stratified by which type of platform (freehand or REMS-assisted) was used first. The first trial performed by microvascular-naïve participants had a mean TTS of 1,461 seconds, compared to 1,124 seconds for the second trial. TTC was similar for both trials for the microvascular expert. In qualitative self-assessment, all naïve participants found that the REMS platform was more accurate and stable and provided better instrument handling compared to freehand. Four of the six described the REMS’ available workspace as a limitation. Limitations included a small corresponding sample size, the early prototype model used, and a lack of qualitative measures to assess the overall integrity of the anastomosis.
Citation: Feng AL, Razavi CR, Lakshminarayanan P, et al. The robotic ENT microsurgery system: a novel robotic platform for microvascular surgery. Laryngoscope. 2017;127:2495–2500.